
极致感知能力,覆盖多种车位类型和障碍物类型,满足不同复杂场景,打造舒适智能的自动泊车体验
基于多感知融合,打造停车场辅助驾驶,单次路线记忆,实现限定区域或场景内的自主巡航、会车,自动避让行人、绕行障碍物,从而完成最后一公里记忆泊车。
与场端打通,多系统冗余,可在下车点下车,由车辆自主驶向车位,并支持反向接驾,跨层迁越,实现代客泊车。
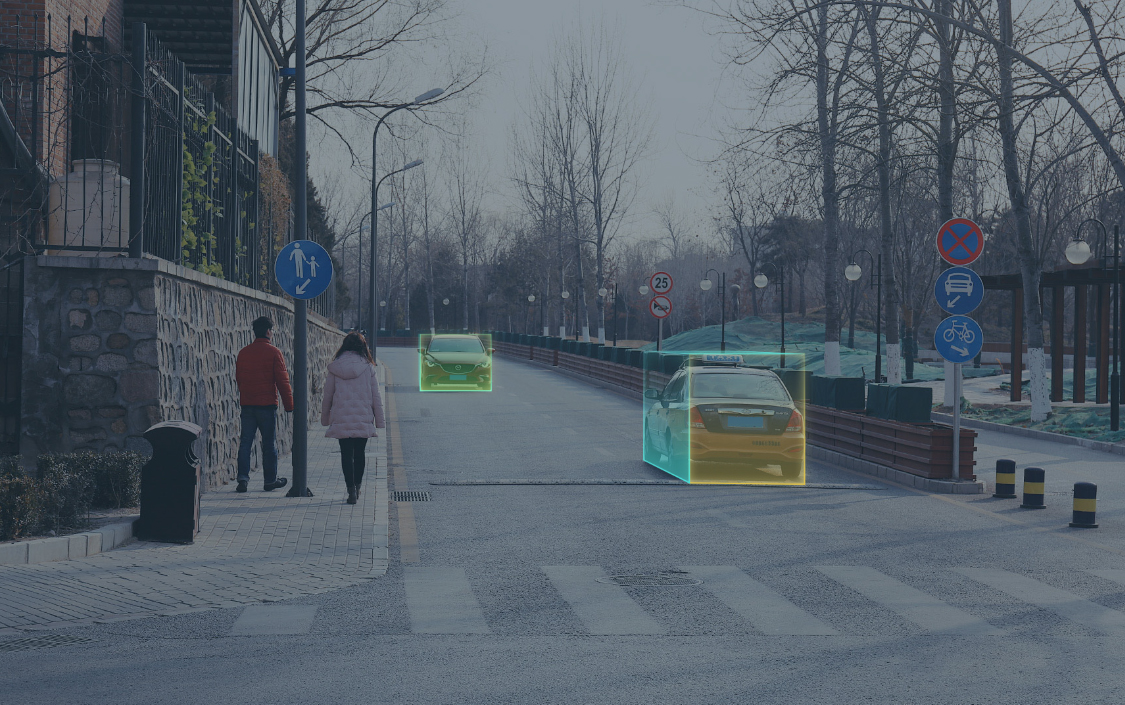
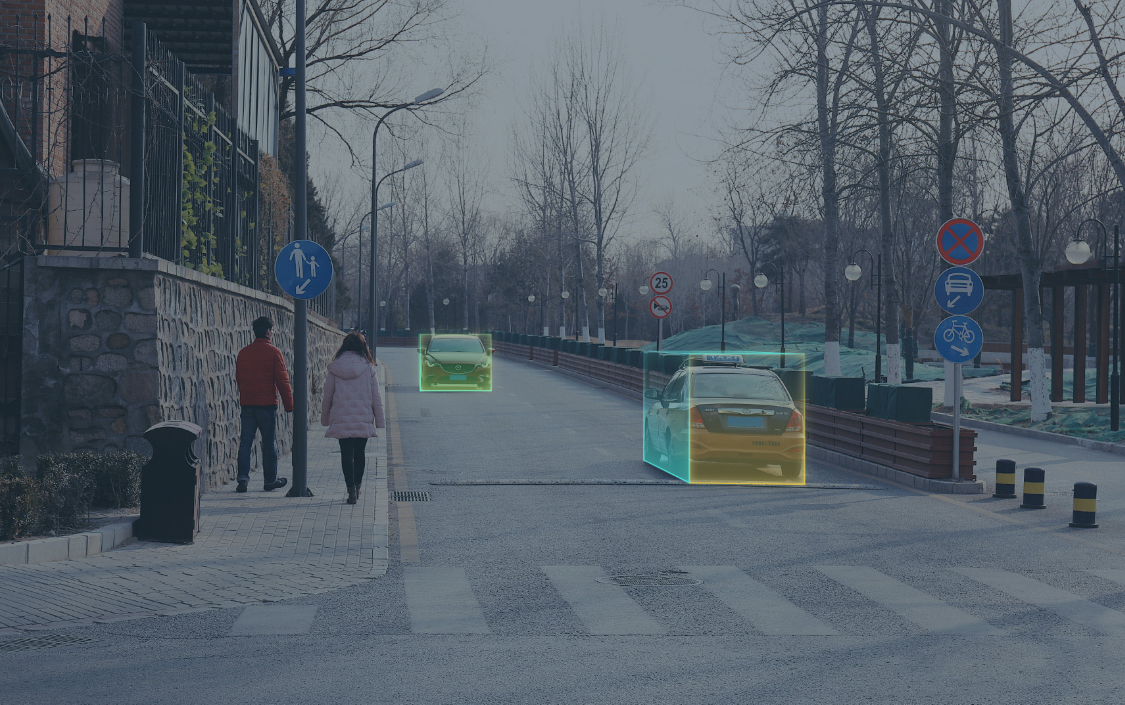
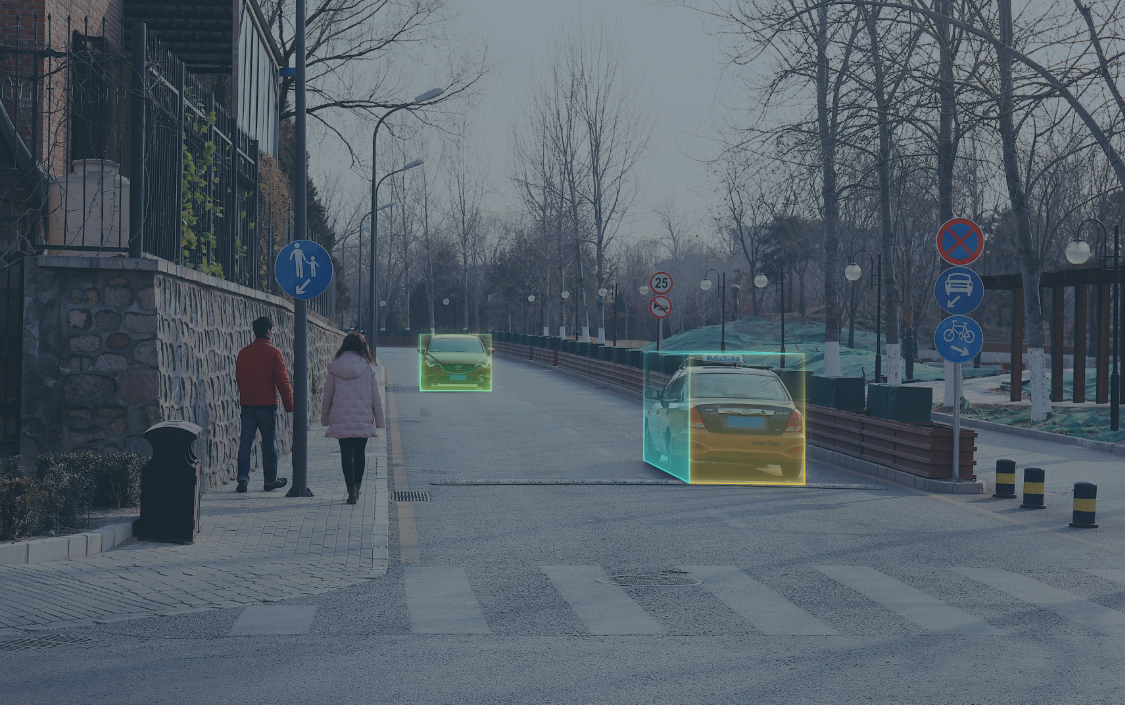
通过特有的感知融合模型该可准确的判断物体的位置和形态。提升系统的探测率和准确率>96%。综合所得到的环境信息,标记物的精准度<10cm。采用独创的ODM技术,可在车辆运行过程中实时更新环境信息,构建车身周围的实时地图,并跟踪20m*20m范围内所有障碍物相对车体的位置,从而实现车身360°物体跟踪及定位。根据车辆运行的轨迹和当下的速度、方向盘转角,可预测物体碰撞,并作出反应,提示可避让的转向角。

相较于现有传感器拥有更远的探测距离和在恶劣环境下稳定输出的能力。可以支持更多应用下的高级驾驶辅助功能。